
{kind=link}
La maintenance prévisionnelle au cœur de l’industrie 4.0
Avec la vague du numérique et la digitalisation liée à l’émergence de l’industrie 4.0, la maintenance prévisionnelle prend toute sa place dans les entreprises industrielles, en combinant différentes technologies : des capteurs intelligents (IoT, Internet of Things), des logiciels de GMAO (Gestion de Maintenance Assistée…

{kind=link}
L’ingénierie des systèmes complexes à l’ère de la collaboration : enjeux et perspectives
La complexité des systèmes ne cesse de croître, dans tous les domaines, du fait de l’intégration de toujours plus de fonctions internes au système, mais également de son interaction toujours plus forte avec son environnement, ouvrant la voie à toujours plus de services. L’ingénierie des…

{kind=link}
Automated driving safety validation: proposals from the French Eco-system
Reflections on the future of automated driving safety homologation/certification have been very active recently, based on the general consensus that existing validation approaches have to be significantly modified. At the United Nation level, a dedicated group has been set up on Automated and Connected Vehicles…
{kind=link}
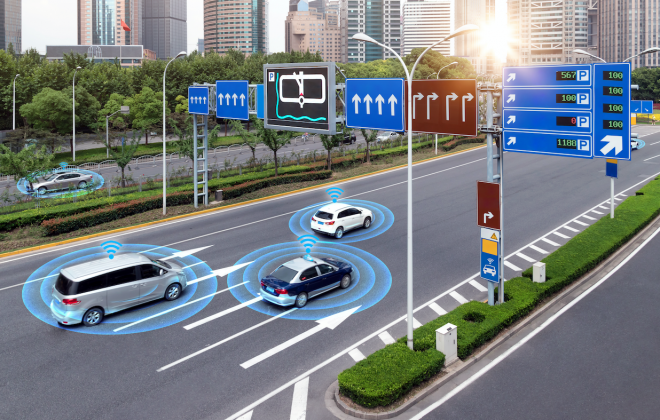
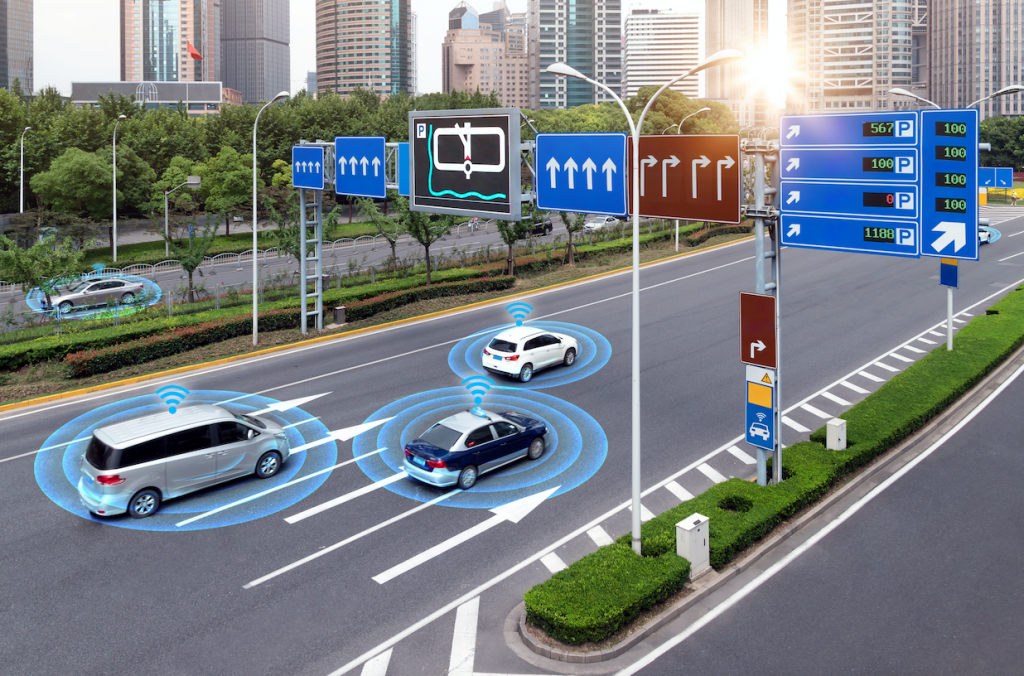
Le machine learning au service de la conduite autonome
Le machine learning est aujourd’hui omniprésent. Il transforme peu à peu l’industrie et notamment le marché des voitures autonomes. Au sein de cet article, nous expliciterons la notion de voiture autonome, dans le but d’identifier les méthodes existantes pour les faire fonctionner. L’enjeu est primordial…

{kind=link}
A glimpse of Smart City
By 2050, 70% of the world population is likely to live in cities. Albeit, the footprint of cities only represents a few percentage of Earth surface area, but is a major contributor to pollution. Therefore, a legitimate quest is launched for optimizing resources and organization…

{kind=link}
Vérification des réseaux de neurones : entre besoins et défis
Le Réseau de Neurone (RN) est l’une des principales méthodes d’apprentissage automatique supervisé. La vérification de son comportement, c’est-à-dire l’évolution de ses sorties en fonction de la variation de ses entrées, représente un réel défi. Néanmoins, cette vérification est nécessaire dans un environnement incertain où…

{kind=link}
Challenges of the Autonomous Train
Artificial Intelligence is becoming ubiquitous in today’s world. One of the most impacted sectors, a major field of study at IRT SystemX, is Autonomous Transportation. While autonomous cars have garnered the most media attention, trains have recently joined the race towards autonomy. In this blogpost,…

{kind=link}
Cyber-immunité des systèmes industriels : entre mythes et réalité
L’industrie constitue un écosystème privilégié d’innovations technologiques et de gains de productivité. Sur le plan stratégique, le tissu industriel occupe également un rôle déterminant pour la souveraineté et l’indépendance économique et énergétique d’un pays. En 2010, l’attaque Stuxnet, visant les installations nucléaires iraniennes, a révélé…
{kind=link}
Le Machine Learning, un domaine de l’Intelligence Artificielle en forte évolution
Le Machine Learning est l’une des principales technologies de l’Intelligence Artificielle (IA). Cet article vous propose un état des lieux des approches de Machine Learning et des plateformes et outils actuellement disponibles dans ce domaine. Le Machine Learning et sa place dans l’IA Dans leur…

{kind=link}
Les approches d’idéation centrées sur les usages
Les approches de conception centrées sur les usages aident à innover sur des produits et services, en intégrant les attentes et problèmes des usagers au travers d’une scénarisation de cas d’usage. Dans ce cadre, cinq activités clés structurent l’approche du concepteur : la collecte de…